产品名称 |
高速公路绿篱机,绿篱修剪机,全自动割草机,边坡剪草机 |
面向地区 |
全国 |
动力类型 |
气动 |
针对绿篱修剪机的发展现状,设计开发了一种小型自走式绿篱修剪机,包括动力系统设计和行走装置设计、修剪装置设计,并且利用三维建模软件建立了移动式绿篱修剪机的三维模型.所设计的移动式绿篱修剪机在所查阅的文献中尚未发现有相同机型的报道,属原创型产品.相比现在小型绿篱修剪机以手持式为主的状况,该绿篱修剪机能够有效降低绿篱修剪的劳动强度,提高修剪质量,有比较广阔的市场前景.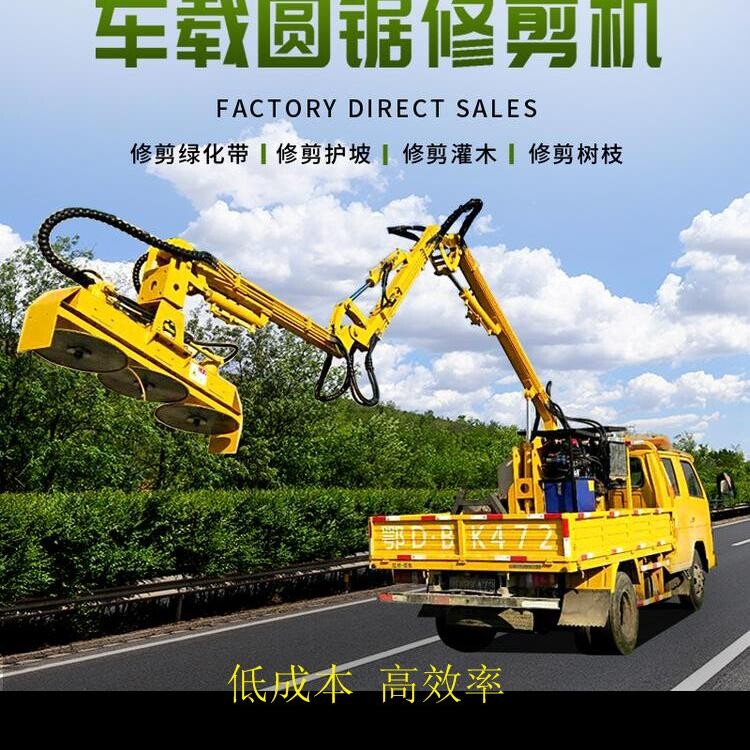
车载式公路绿篱修剪机避障结构,包括防护外壳,刀架,驱动结构和避障组件;防护外壳包括侧挡板和弧形罩,侧挡板固定地设在弧形罩两端;刀架铰接在侧挡板上且位于弧形罩内;驱动结构设在一侧挡板上,驱动结构与刀架连接并可驱动刀架转动;避障组件包括集绳卷筒座,复位拉绳和复位结构,所述集绳卷筒座和复位结构均设在弧形罩顶部,所述复位拉绳一端与复位结构连接,另一端与集绳卷筒座连接;本实用新型结构设计合理,可实现防护外壳的大范围摆动,其不仅利于避障,同时还可促进刀架使用的灵活性,增加使用的方便性.
高速公路不仅是交通运输业的一部分,也是""发展战略的核心.如今,我国的高速公路总里程已达13.1万公里,全球,用于绿化环境,防止眩光,保障安全的绿篱隔离带在高速公路中处处可见.为了达到良好的绿化指标,需要对其进行定期的养护修剪.传统的高速公路绿篱修剪设备存在智能化程度低,修剪稳定性弱,功能多样性差等问题,针对上述问题设计一款新型的高速公路绿篱修剪机器人,对修剪机械臂进行正/逆运动学分析,操作空间求解,刚柔耦合动力学建模以及避障路径规划等研究.本课题源于国家自然科学基金资助项目(项目编号:51375519).本文主要研究内容如下:
(1)根据绿篱隔离带的绿化指标和修剪机器人的技术要求,规划与建立高速公路绿篱修剪机器人的总体布局,从修剪对象,养护功能以及实际情况等考虑,设计高速公路绿篱修剪机器人的本体结构,分析驱动系统的工作方式和控制系统的设计要求,完成驱动系统与控制系统的设计,构建并研制实验样机.
(2)以设计的修剪机械臂为研究对象,通过D-H法创建其连杆简化模型,进行运动学正解,求得修剪机械臂的末端刀具位姿方程,采用反变换法进行修剪机械臂逆运动学解耦,推导各关节角运动表达式,基于Monte Carlo法求解修剪机械臂操作空间,通过MATLAB进行操作空间的数值仿真,验证运动学模型的正确性和修剪机械臂结构的合理性,为后续动力学和避障规划研究作铺垫.
(3)基于多体柔性动力学理论,通过浮动系法建立柔性修剪机械臂系统坐标系,根据假设模态法描述臂杆弹性变形量,采用Lagrange法及虚功原理推导修剪机械臂刚柔耦合动力学方程,在ADAMS仿真软件中进行修剪机械臂刚性和柔性的动力学对比仿真,研究柔性因素对系统动力学特性的影响,进一步验证建立刚柔耦合动力学模型的必要性,为以后控制和结构优化研究提供理论依据.
(4)针对非结构环境下高速公路绿篱修剪机器人手臂实时准确避障问题,提出一种基于扰动人工势场法(PAPF)的避障路径规划解决方法.根据绿篱隔离带与障碍物分布情况,构建包络障碍物简化模型,分析机械臂与障碍物的碰撞条件,求解机械臂在修剪过程中的避碰空间.引入斥力场调节策略优化势场模型,建立斥力场扰动机制调整斥力影响方式,消除传统算法中局部极小点和目标不可达等现象.在避碰空间应用PAPF算法进行路径规划仿真,仿真结果表明,机械臂跳出局部极小点,灵活顺利避障,成功抵达目标点,验证了该方法的有效性和可行性.